SRM Autonomous Underwater Vehicle
SRM Autonomous Underwater Vehicle
SRMAUV Software
About
SRMAUV is an under-graduate student team of SRM Institute of Science and Technology, founded in the year 2013. This team of underwater robotics enthusiasts share our common interest in designing Autonomous Underwater Vehicles. It comprises of members of several domains including Computer Science, Electrical and Mechatronics. Currently building the fifth iteration of the vehicle (ZARNA 2.0), the team works around the year doing research in underwater robotics, prototyping models, and testing the vehicle. The team participates in various national and international competitions such as Robosub, NIOT SAVe and SAUVC.
Achievements 🏆
- National Champions: Secured first place at NIOT (National Institute for Ocean Technology) SAVe competition held in Chennai in 2015.
- Sponsored by the Indian Government to participate in AUVSI’s international Robosub competition at San Diego, USA in 2015 to represent India.
- Received NVIDIA GPU-grant sponsorship for vehicle.
- Team invited to exhibit vehicle at ACMEE 2018, 13th International Machine Tool Exhibition held at Chennai Trade Centre, Tamil Nadu.
- Raised over 111,000 INR in funds for building vehicle.
- Selected among 15 AUV teams out of 22 across India to participate in NIOT SAVe 2019 competition.
- Presented novel underwater 3D simulation framework at IEEE OES - Underwater Technology ‘19 conference in Kaohsiung, Taiwan.
Vehicle ⛴
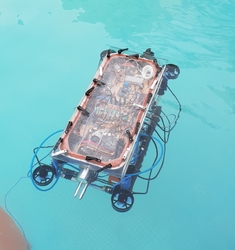
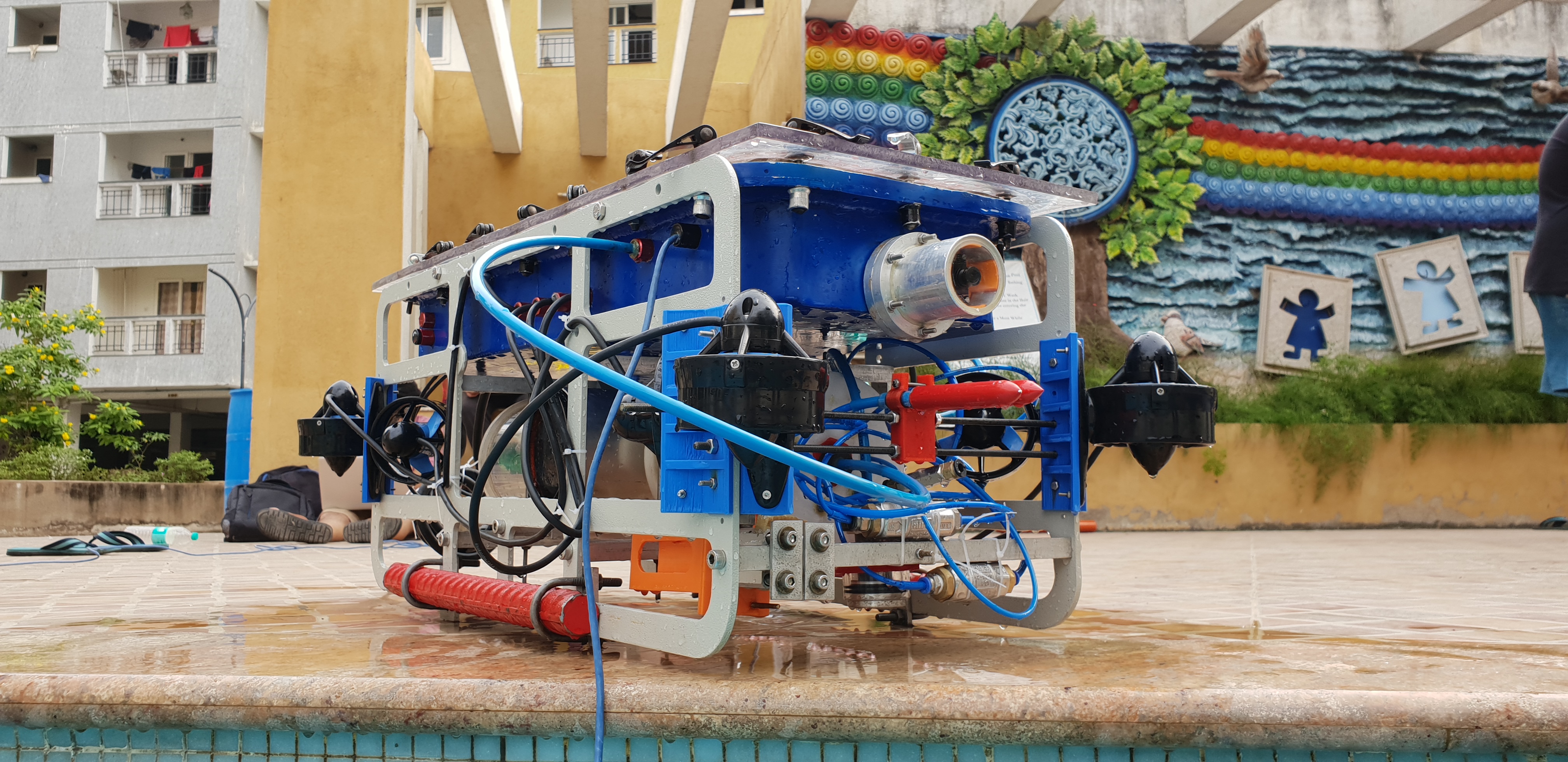
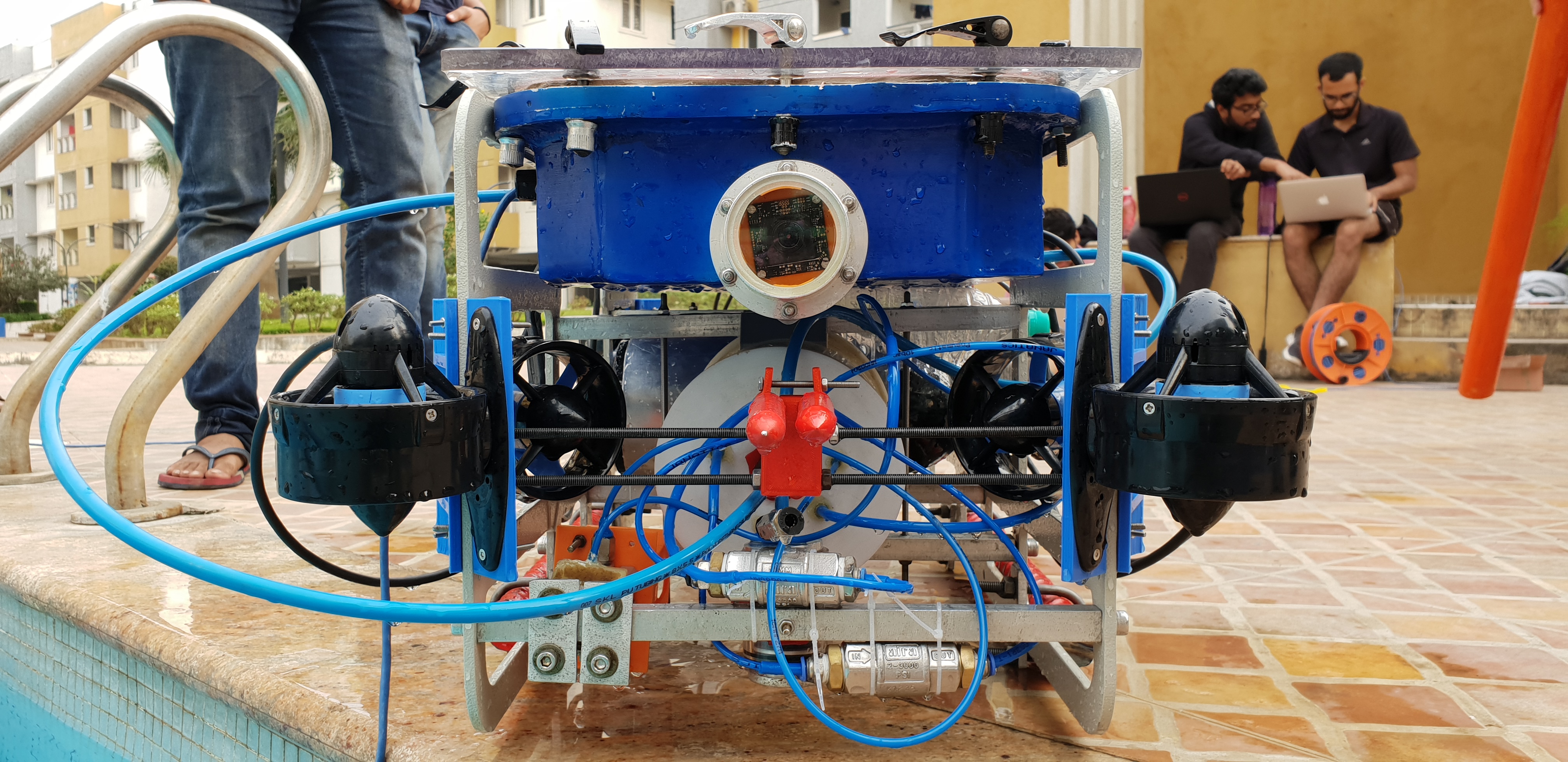
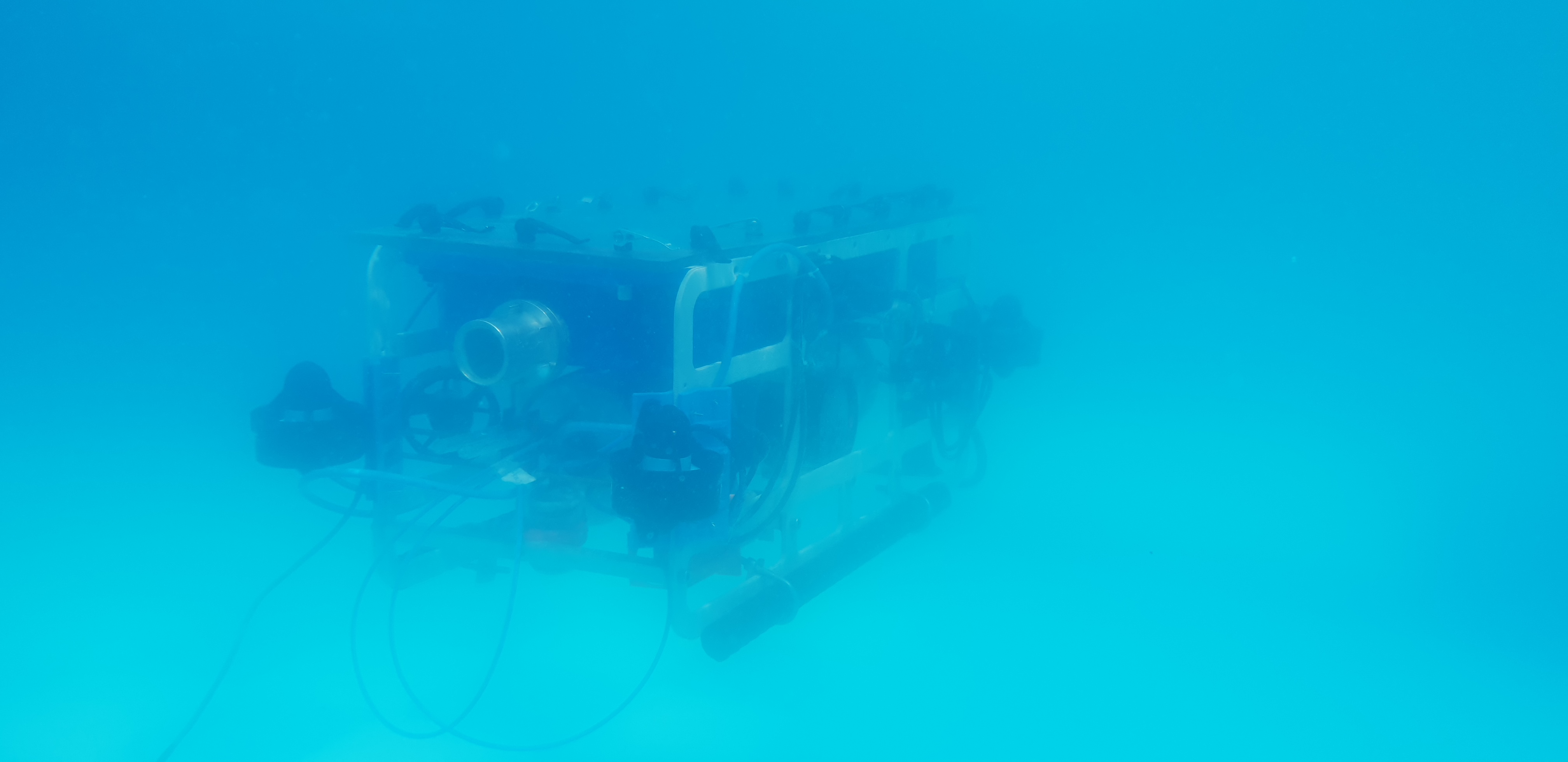
ZARNA
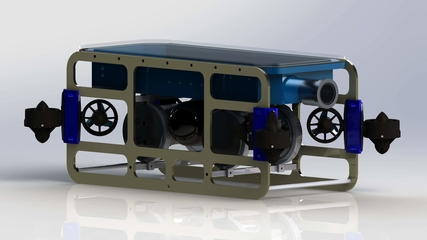
- NVIDIA Jetson TX1
- Sparton AHRS-8 IMU Sensor
- BlackFly S USB-3 Cameras
- Blue Robotics T-200 Thrusters
- ROS Melodic / Ubuntu 18.04
More vehicle specifications here.
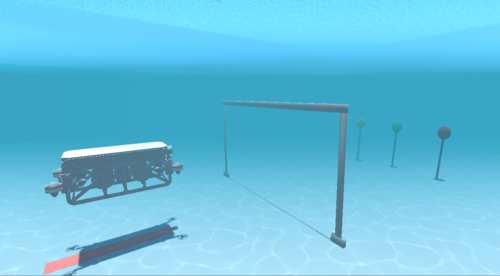
Simulation 🎮
Open Source Simulator for Unmanned Underwater Vehicles using ROS and Unity3D.
Website / Code / Paper / Presentation
 |
 |
Publication 📃
@INPROCEEDINGS{8734309,
title={Open Source Simulator for Unmanned Underwater Vehicles using ROS and Unity3D},
author={P. {Katara} and M. {Khanna} and H. {Nagar} and A. {Panaiyappan}},
booktitle={2019 IEEE Underwater Technology (UT)},
doi={10.1109/UT.2019.8734309}}
year={2019},
Code 👨🏻💻
Code for vehicle’s software stack, underwater simulation framework, deep learning object detection ROS packages, as well as other ROS-based utility tools has been open-sourced at github.com/srmauvsoftware.
Gallery 🎞
 |
 |
 |
 |
Team 👥

Sponsors 🤝
 |
 |
|
 |
 |
 |
 |
 |
 |
Contact 📧
Reach out to us at srmauvteam@gmail.com.
| Youtube |