Mission Planner
The mission planner used in the simulation system is a high level module based on the concept of finite state machines. Mission planning is the key to achieve intelligent behaviour in an autonomous system. It consists of an apparatus for top-down decomposition of states where each state represents a task that the robot needs to perform.
Real-world complex behaviors can be developed using hierarchical and concurrent state machines to perform tasks like motion in different degrees of freedom, object detection and obstacle avoidance.
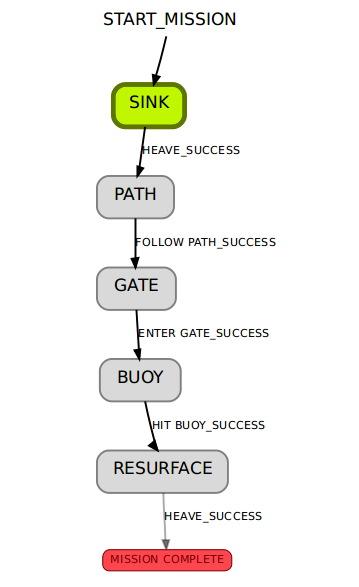
The mission planner based on the above concept has been implemented using the SMACH package provided by ROS. The mission planner contains low level states for motion of the vehicle along or about each possible degree of freedom - Roll, Pitch, Yaw, Surge, Sway and Heave. Using combinations of these low level states, higher level sub-missions can be developed. The state hierarchy diagram depicts the tree structure for the developed mission.
Mission planner works internally as follows:
- mission_planner.py
- main() calls listener().
- listener() creates a new node called mission_planner. The node subscribes to a topic called /zsys and calls the callback().
- The callback() calls main() where an object called sm of StateMachine is created with 3 outcomes - [‘mission_complete’, ‘mission_failed’, ‘aborted’]
- sm performs 3 tasks - sink to a certain depth, align to a certain heading, move forward for some seconds.
Sink (sm, 'SINK1', 515, 'HEADING1')
Heading(sm, 'HEADING1', 75,'FORWARD1')
Forward(sm, 'FORWARD1', 6, 'FORWARD2')
Forward(sm, 'FORWARD2', 12, 'mission_complete')
- Sink.py & Depth.py
Sink (<state machine object>, <name of state>, <pressure>, <next state>)
- In Sink.py the Sink class’s constructor is called which sets the initial pressure.
- A substate called sm_sub is created with outcomes as [‘depth_success’, ‘aborted’].
- sm_sub creates an object called depthTask of the class Depth.
depthTask = Depth(INITIAL_PRESSURE, 'depth_success')
The Depth.py’s constructor sets the values of pressure and task variables.
depthTask.addDepthAction(smach_StateMachine)calls the addDepthAction(self, sm) method of class Depth where a new SimpleActionState DEPTH is added to sm and depthCallback() is called, transitions being ‘succeeded’:self.TASK, ‘preempted’:’DEPTH’, ‘aborted’:’aborted’. - In depthCallback(), the depth_setpoint is set to PRESSURE’s value.’
- From mission_planner.py, execute() is called which creates a SimpleActionClient and sends the PRESSURE as the goal and returns ‘DepthReached’/’aborted’.
- Heading.py
Heading (<state machine object>, <name of state>, <heading>, <next state>)
- In Heading.py the Heading class’s constructor is called which sets the initial heading.
- A new SimpleActionState heading1 is added to sm and headingCallback() is called..
- In headingCallback(), the heading_setpoint is set to HEADING’s value.’
- From mission_planner.py, execute() is called which creates a SimpleActionClient and sends the HEADING as the goal and returns ‘HeadingReached’/’aborted’.
- Forward.py
Forward (<state machine object>, <name of state>, <time>, <next state>)
- Creates a SimpleActionState called surgeServer, calls goalCallback() to move the Underwater Vehicle forward for the time sent from mission_planner.py.